7
移动机器人系统——磁条导航舵轮AGV
2025/2/10
高效灵活、可靠稳定
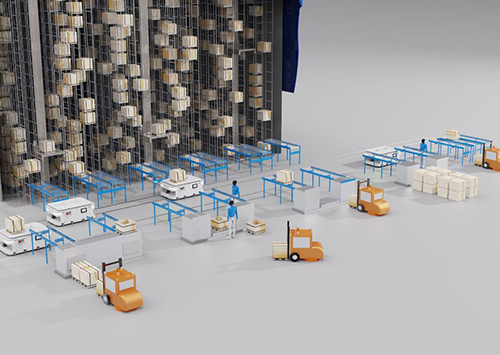
随着信息化大数据应用的普及,传统的仓储、物流运作方式已无法满足飞速增长的业务需求,必须加快仓储、物流的自动化和智能化建设。引入智能仓储,可高效对接生产与物流,提高企业的生产效率。针对不同的环节,讯特以解决行业痛点为出发点,经过大量现场测试,积累了丰富的现场调试经验,开发了不同的解决方案,可实现快速落地、系统长期稳定运行。
磁条导航舵轮AGV主要应用于1吨以上负载的货物搬运,采用舵轮结构能够更加灵活的实现多方位运动,通过顶升、共同与平台的配合,提高搬运效率,减少了人工成本和时间成本,提升工厂生产自动化。
应用场景
负载量:适用于1吨以上负载的货物搬运。
控制系统采用舵机(驱动+旋转)的方式进行驱动控制,通过磁导传感器检测到的数据对舵机旋转轴的转向角度进行控制,配合计算得到的驱动轴速度,实现在运动过程中的纠偏和转向,保证AGV能够稳定沿着设定的任务路径行走。
技术参数
方案优势
1、保证快速落地
标准化整车控制程序,项目快速落地。
2、支持二次开发
具有标准化底层运动控制接口,支持逻辑层进行自主二次开发。
3、多种运动控制算法
具有多种车型的运动控制算法(单舵轮、双舵轮、四舵轮等),满足客户不同现场需求。
4、路径灵活
支持可视化路径编辑、单机自主路径规划、联机系统调度。
5、参数可视化
无线屏通讯,可视化参数、便捷修改。
6、定制化服务
提供定制化服务,满足客户需求。
随着信息化大数据应用的普及,传统的仓储、物流运作方式已无法满足飞速增长的业务需求,必须加快仓储、物流的自动化和智能化建设。引入智能仓储,可高效对接生产与物流,提高企业的生产效率。针对不同的环节,讯特以解决行业痛点为出发点,经过大量现场测试,积累了丰富的现场调试经验,开发了不同的解决方案,可实现快速落地、系统长期稳定运行。
![]()
磁条导航舵轮AGV主要应用于1吨以上负载的货物搬运,采用舵轮结构能够更加灵活的实现多方位运动,通过顶升、共同与平台的配合,提高搬运效率,减少了人工成本和时间成本,提升工厂生产自动化。
应用场景
负载量:适用于1吨以上负载的货物搬运。
![]()
控制系统采用舵机(驱动+旋转)的方式进行驱动控制,通过磁导传感器检测到的数据对舵机旋转轴的转向角度进行控制,配合计算得到的驱动轴速度,实现在运动过程中的纠偏和转向,保证AGV能够稳定沿着设定的任务路径行走。
当RFID传感器检测到AGV行走路径上布置的功能标签卡时,AGV开始执行岔路选择、原地旋转、停止等功能,实现AGV的导航控制、功能控制以及安全保护。
![]()
技术参数
方案优势
1、保证快速落地
标准化整车控制程序,项目快速落地。
2、支持二次开发
具有标准化底层运动控制接口,支持逻辑层进行自主二次开发。
3、多种运动控制算法
具有多种车型的运动控制算法(单舵轮、双舵轮、四舵轮等),满足客户不同现场需求。
4、路径灵活
支持可视化路径编辑、单机自主路径规划、联机系统调度。
5、参数可视化
无线屏通讯,可视化参数、便捷修改。
6、定制化服务
提供定制化服务,满足客户需求。

昆山讯哥特机电设备有限公司 版权所有 苏ICP备19023779号-2 免责声明